

Meie robot 2024/25
Me kasutame Spike Prime robotit. Meie roboti nimi on Milli-Kuubik, lühendatult Miku. Nimi tuleneb sellest, et meie nelinurksesse robotisse on sel aastal ehitatud käigukast, mille keerukus tase meenuab teatud hetkedel ruubikukuubikut ning meie innovatsiooni projekti teemas on kesksel kohal millimallikad. The brick orientation is 90 degrees compared to the direction of movement. Robotil on sirge seinad, peal keskel on kontroller. Ekraanisuund on 90 kraadi võrreldes liikumisuunaga.
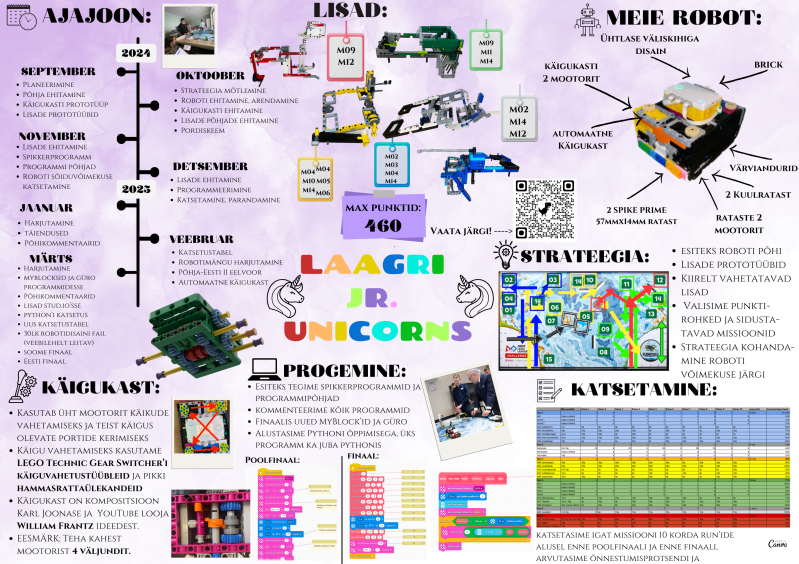
- Spike Prime brick
- Käigukast
- 4 keskmist mootorit
- Güroskoop
- 2 SPIKE PRIME 57mmx14mm ratast
- 2 kuulratast
- 2 värviandurit

Meie põhjalik robotidisaini fail 2024/25
Selles failis on kirjas kõik, mis seondub meie roboti, robotimängu ja selle protsessiga. Nüüd on saadaval ka uuendatud fail.
Käigukast
-
Kasutab üht mootorit käikude vahetamiseks ja teist käigus olevate portide kerimiseks
-
Käigu vahetamiseks kasutame LEGO Technic Gear Switcher’i käiguvahetustüübleid ja pikki hammasrattaülekandeid
-
Käigukast on kompositsioon Karl Joonase ja YouTube looja William Frantz ideedest.
-
EESMÄRK: Teha kahest mootorist 4 väljundit.

Stud.io 3D mudel meie käigukastist.

Lisad
Meil on kokku 5 lisa, mis on disainitud erivärvilisteks. Lisade raamid on ühesuguse ehitusega ning käivad roboti külge kiirelt ja lihtsalt roboti peale asetades. Kõikidest oma lisadest tegime 3D mudelid Stud.io's.

Sinine lisa:
-
Üles-alla käiv mootori, hammarataste, kolmeste liitmike ja kaheste ristvõllidega kraana, mida kasutame sukelduja (M04) tõstmiseks, selleks peab aktiivne olema käik nr. 1.
-
Lisa eesotsas on laine kujuga tala, mis aitab ära teha korallpungad (M01) ja hai (M02).
-
Lisa paremal küljel on tala, mille eesmärgiks on ära teha korallrahu (M03).
-
Lisa ees on reha/puuri süsteemiga koguja, krillide ja korallide kogumiseks.
-
Lisa raami ees ja taga on kuulrattad, et lisa oleks raskem ja stabiilsem.

Mustvalge lisa:
-
Lisa paremas eesmises nurgas on kummisüsteemiga katapult, mida kasutame kolmhargi lennutamiseks (M14) Selleks kasutame Lego rihmasid, mis on pingutatud ning lukustatud päästikumehhanismiga, mis aktiveerub laevavrakile sisse sõites ning vabastab rihmades salvestunud energia kolmharki, lennutades selle laevavrakist välja, maandudes loodetavasti kodualasse.
-
Reha/puuri süsteemiga koguja, millega võtame uppunud laeva juurest kaasa 1 krilli (M12).
-
Vasakus eesmises nurgas on nurkadest ja taladest koosnev liigendsüsteem, mida kasutame hai robotilt maha lükkamiseks.

Kollane lisa:
-
Lisa vasakus eesmises nurgas on hammastega talast ja ristvõllidest kopp, mida kasutame sukelduja (M03) viimiseks ja veeproovi (M14) tõstmiseks. Selleks peab aktiivne olema käik nr. 1.
-
Lisa paremas eesmises nurgas on ringiratast käiv haamer, mida kasutame sukelaparaadi teele saatmiseks (M10). Selleks peab aktiivne olema käik nr. 2.
-
Lisa paremal küljel on taladest kaldtee, millega tõstame hukkunud laeva masti (M06).
-
Lisa raami ees ja taga on kuulrattad, et lisa oleks raskem ja stabiilsem.

Roheline lisa:
-
Lisa küljes on astla laadne mootoriga ringiratast käiv ristvõllide kombinatsioon, selleks peab aktiivne olema käik nr. 4. Kasutame seda sonari (M11) lahendamiseks.
-
Lisa ees on reha/puuri süsteemiga koguja, krillide, korallide ja planktoniproovi kogumiseks ning selle kohal on taladest moodustuv kast, kuhu kukub kraaken (M09).
-
Lisa raami ees ja taga on kuulrattad, et lisa oleks raskem ja stabiilsem.

Punane lisa:
-
Lisa vasakus eesmises nurgas on taladest torni otsas sahtliga kast, millega kukutame vaala sisse 5 krilli (M12).
-
Lisa ees on suunajad, millega vaala vastu sõites avaneb vaala suu.
-
Lisa paremal küljel on kaldteega block, mis tõstab paati (M13) selle lenksust, et sama blocki küljes olev ristvõll saaks selle sõites teisele poole lükata.
-
Lisa raami ees ja taga on kuulrattad, et lisa oleks raskem ja stabiilsem.
Failide avanemiseks pead need oma arvutisse alla laadima ja läbi Stud.io avama. (Peab olema Stud.io app)
Meie robot 2023/24
Me kasutame Spike Prime kontrollerit, millest ehitasime armsa ja kompaktse roboti. Meie roboti nimi on Gigant-Mardikas. Robot koosneb on kahest suurest mootorist rataste jaoks ja kahest väikesest mootorist lisade jaoks. Anduritest on robotil kaks värviandurit ning kasutame osades missioonides ka güro. Robotil on must ja tugev kere, et iga lisaga tekiks erineva värvi efekt. Meil on 5 lisa, millest nelja (värvilist) kutsume erinevate putukatest inspireeritud hüüdnimedega. Robotil on ka pagasnik, kus hoiame raskusi, peidame kaableid jne. Selleks et me oma robotit laadida saaksime käib meie pagasnik kergesti lahti. Meie max punktid on 360p.




Väljasõidud
Null sõit – Robot mahub kodualasse ning ei kaota laual täpsuskettaid.
Esimene sõit – Tõstame veereva kaamera takistuse üles, tõmbame võtteplatsi kaamera oma sihtringi.
Teine sõit - Lahendame 3D kino.
Kolmas sõit - Tõstame helipuldi kolm nuppu õigele kõrgusele.
Neljas sõit - Muudame etenduse stseeni oranžiks ja sõidame teisele laua poolele.
Viies sõit - Lahendame lava ja keerame hologrammesineja. (M06;M07)
Kuues sõit - Lükkame veereva kaamera sõitma.
Seitsmes sõit - Viime muuseumi alale eksperdi (Anna), neli oranži fänni ning täielikult pjedestaalile toetatud innovatsiooniprojekti mudeli.
Kaheksas sõit - Rammime vastu printerit ning sõidame torni juurde. Tõstame valgusshow sinise peale ning jätame torni ümber asuvasse ringi kolm oranži mehikest.
Lisad
Meie robotil on 5 lisa+1 stabiilse stardipunkti määraja. Neli neist on ehitatud värvipõhiselt - sinine (pilt 1), punane (pilt 2), kollane (pilt 3) ja roheline (pilt 4). Iga värviline lisa sümboliseerib putukat. Roheline - rohuirts, kollane - mesilane, punane - lepatriinu, sinine - liblikas. Roboti põhi ise on mardikas. Viies lisa (pilt 5) on pisike ja natuke teistsugune lisa. Lisad pannakse roboti külge eestpoolt peale tõmmates universaalse lukustussüsteemiga. Igal lisal on küljes sellised ristikujulised jupid, mis väga kergesti ühenduvad meie roboti mootoriga.
Kollane lisa - Kollane lisa koosneb kahest kopast ja kasutab seega mõlemat kahte mootorit. Kasutame seda lisa 1,2. ja 4. run'i jaoks. See on värvilistest lisadest ainuke, mida kasutame laua lääne-poolel.

Pilt 1
Punane lisa - Punane lisa koosneb siledast seinast/talast, hammasrattasüsteemist ning väikesest aga kõrgest kangist. Kasutame seda lisa laua ida-poolel, 5 run'i jaoks. Lahendame sellega M06 ja M07 missioonid, hologrammesineja lükatit rammime seinaga/talaga, lava kõlarid kerime lahti mudeli parempoolse kõlari hammasratset kaudu kasutades hammasrattasüsteemi ning valgustuse osa lahendame oma pisikese, aga kõrgele ulatuva kangiga.

Pilt 2
Sinine lisa - Sinine lisa koosneb asjade vedamise jaoks mõeldud sahast ning võllkangist. Kasutame seda lisa laua ida-poolsel alal, 6 ja 7 run'i ajal. Esiteks lahendame võllkangiga M09 (kaamera) missiooni ning seejärel viime hunniku vidinaid muuseumi alasse ja lahendame M00 (sinise lille) missiooni. See lisa ei kasuta ühtegi mootorit.

Pilt 3
Roheline lisa - Roheline osa koosneb kopp-tõstukist ja suunajatest, aga kasutab vaid ühte mootorit. Kasutame seda lisa laua ida-poolsel alal 8. ehk viimase run'i ajal. Lahendame sellega Mprinter ja M11 missioonid. Esiteks rammime sisse printerile ning seejärel suundume torni poole, kuhu viime kolm oranži fänni ning tõstukiga tõstame valgusshow sinise peale. Meie robotimäng lõppeb rohelise lisaga torni all.

Pilt 4
Viies lisa - Viienda lisa ehitasime pärast poolfinaal, inspireerituna Öökullide lisast. Seda lisa kasutame laua lääne-poolsel alal, 3. run'i ajal. Sellega lahendame M10 missiooni. See on ainuke lisa, mis erinevalt värvilistest lisadest ei kinnitu roboti külge lukustussüsteemiga.

Pilt 5
Strateegia
Valisime missioonide järjekorra selle järgi, mis lisad mis missioon teevad ning ka nende asukohtade järgi. Tegime ajajoone, kuhu märkisime, mis järjekorras missioone teeme ning hakkasime ka selle järgi programmeerima. Programmeerimist alustasime põhjade loomisega, siis hakkasime vastavalt vajadusele täiendama ja arendama. Lisaks märkisime roboti mängulaua joonisel ära, mis lisa mis missiooni teeb.
Lisade lukustussüsteem
Lisade kinnitamiseks oleme loonud originaalse lukustussüsteemi. Kui lisa robotile selga tõmmata tulevad külgedele kaks kangi mida kokku lükates jäävad nende külge kinnitatud naglad roboti külge kinni ning need lukuststakse paika kummisüsteemiga.
Create Your Own Website With Webador